






My WordPress Blog
Quiet time at the popular first day of Shanghai Maker Carnival 2013 had crowds of locals and hackers and makers from Shanghai, Nanjing, Beijing, Shenzhen, Taipai, Indonesia, Singapore, Prague, America, ……
The number of companies large and small also exploded and many of the sponsors also had a major presence, including AutoDesk, Lego, DFRobots. More photos in next posts.


Was going to post a shorter article about below – but it felt way too much like I was just bragging – so I did not publish. Now after seeing and having the view that “XinCheJian = amazing” expressed by others – well I had to publish!
Blogged recently and in past about how amazing XinCheJian is, since then even more amazing things via XinCheJian:
Two weeks ago on the way to XinCheJian’s hackerspace in a container – went past the beginnings of the new FoxConn Shanghai building.
OK that is a bit random – how about a week ago I opened XinCheJian door to let some people in – it was the new owner of HackaDay and the CTO.
I was at XinCheJian to meet with David Li, founder of XinCheJian and so were they, so I got to listened and participate in a really interesting flow of ideas.
Turns out hackaDay is really a side project and is just on of 70 sites they own, mostly in electronics! They have been exploring Shenzhen electronics markets and are looking into ideas for HackaDay!
And it also turns out while I was impressed with meeting them and what they are planning, they were also very impressed with XinCheJian – see their interesting post.
My take on the interesting discussions …… China IS different:
Plus my personal observation is in addition to the growing of companies that “provide access to manufacturers who make your product”, for example:
SeeedStudio, Hackvana, DFRobot and ITeadStudio, Sparkfun, Fritzing, and Upverter and 3D printing services like: Ponoko and Shapeways and hardware accelerators like: haxlr8.
Then there is also a small, but growing shift in the low volume market where more and more companies are now targeting low volume production at “affordable” cost instead of really expensive prototyping/low volume and also providing direct global access to these services, not just local access, for example: DragonInnovation and HWTrek and SnapEDA.
Finally – I hear that Massimo – yes from Arduino will be at XinCheJian in late October after BarCamp and Maker Carnival.
Added header pins to the Xadow breakout board, plugged in the MMU 6050 sensor, uploaded the SAME code been testing on the Teensy++2 and success – the Xadow works as an air mouse!
I did comment out the button code as I have loaned my buttons to another Xinchejian Assistive devices team member. Also changed the movement sensitivity.
Will probably use the Teensy to continue the sensor – library debugging as it has heaps of IO to drive LEDs or a logic analyser. Will also move the draft code for the virtual button control to both boards and then should have a fully functional mouse. There are a lot more features planned, so this will be a highly capable and highly adaptable mouse!
A Xinchejian members first experience is in this second video – only instruction to him was hold like this and rotate! Seems like he was quite impressed!
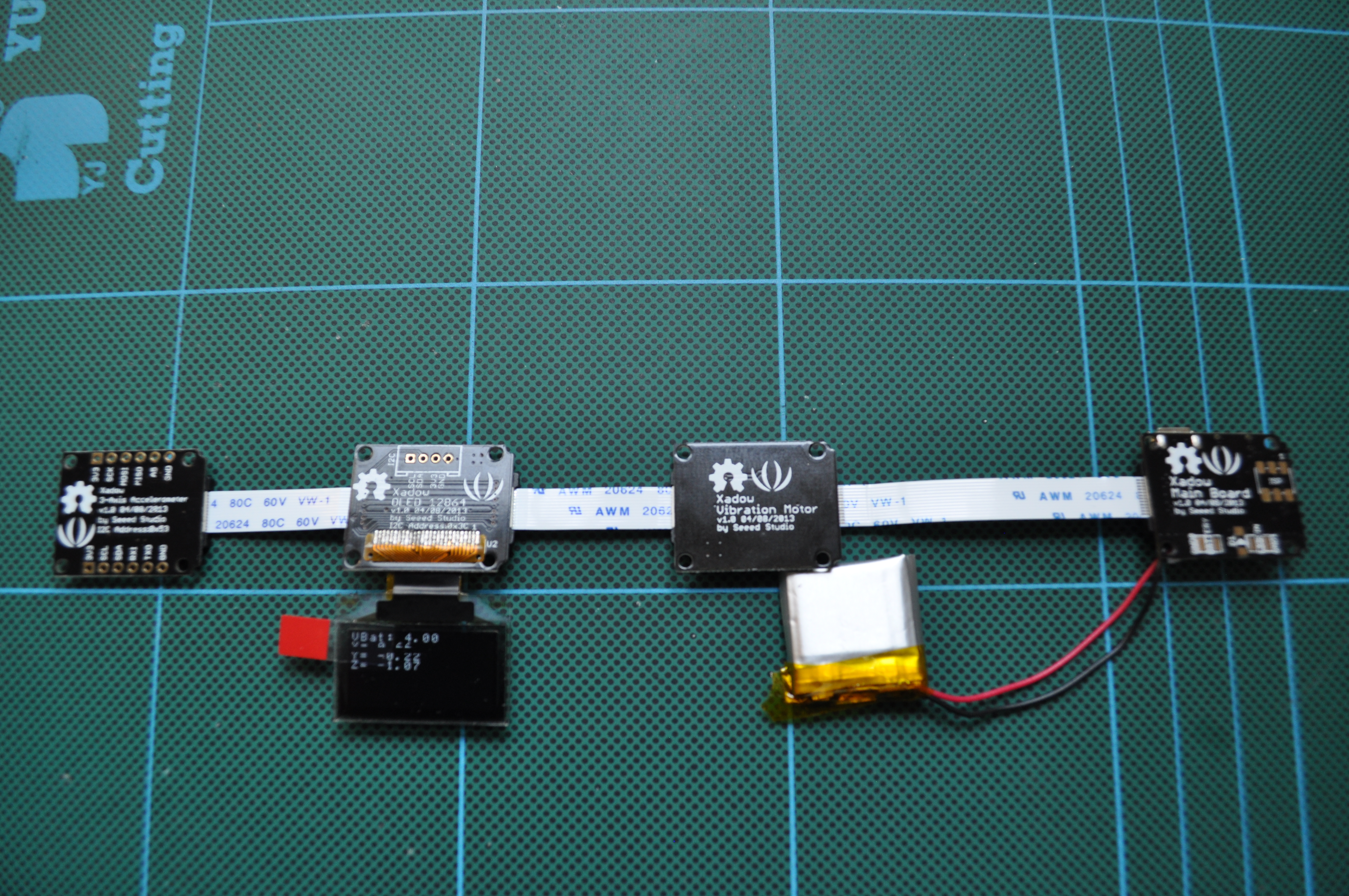
This more complicated demonstration uses an accelerometer to detect movement, displays accelerometer values on the OLED display and vibrates to indicate movement detected!
The demo code works first time, although the wiki instructions do need a little update to help klutzes like me. I’ll have to get stuck into those updates next!
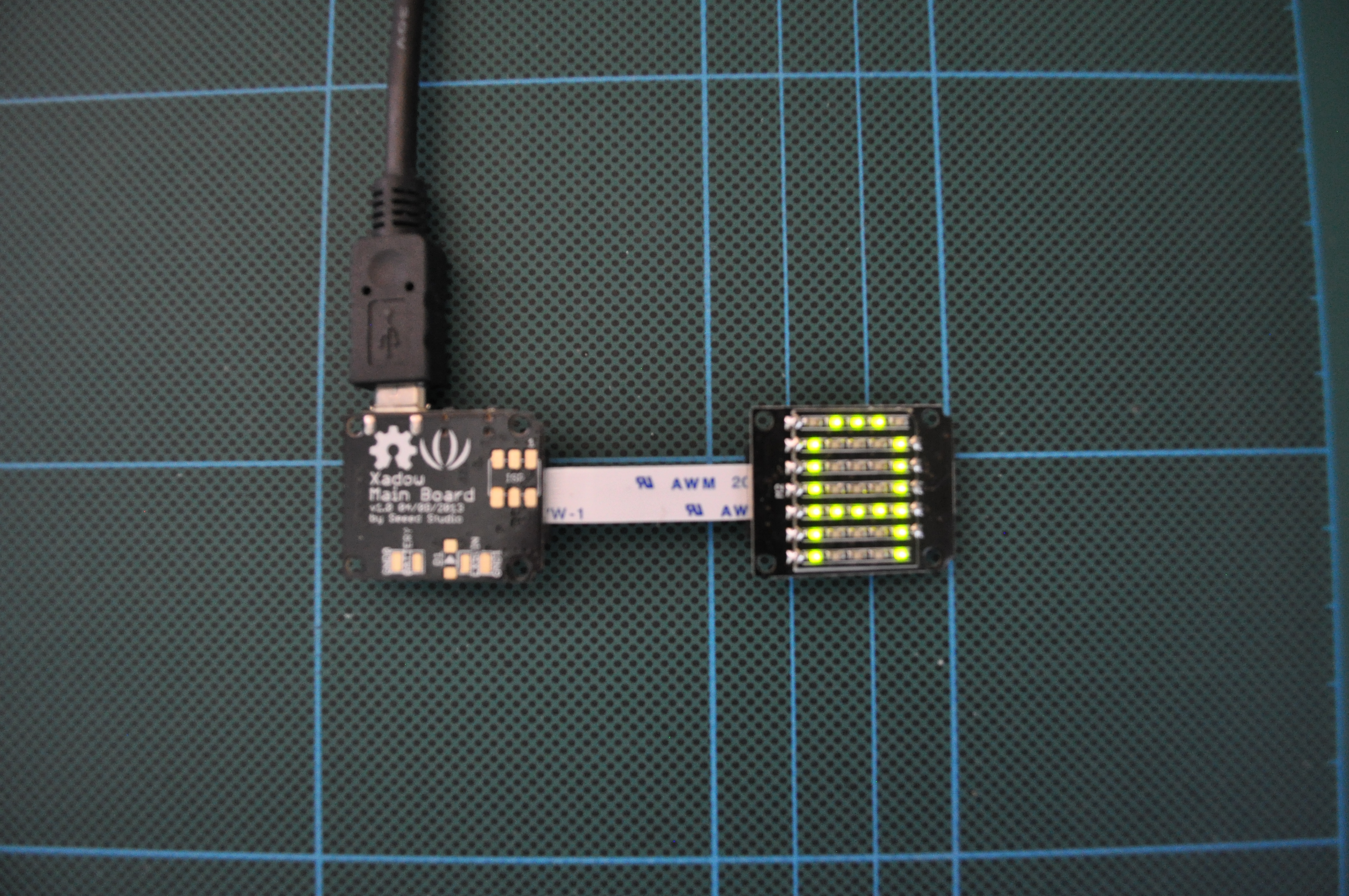 First try with the Xadow was using the LED demo code. Looks really nice and has me thinking hard for some more nice motion displays. Especially as the Xadow display board also has an ATmega168 on it!
First try with the Xadow was using the LED demo code. Looks really nice and has me thinking hard for some more nice motion displays. Especially as the Xadow display board also has an ATmega168 on it!
The Xadow runs well from the supplied battery, so these little devices should really make very useful little wearable devices with plenty of show-off bling and some real capability as well!.
A friend in XinCheJian hackerspace Shanghai asked me today what I have been up to. I was thinking not too much, as I have watched quite a few movies (Sleep Dealer is pretty good, Avatar was way better than I expected) and re/read several books & magazines, but then I started to list some of the things I have been doing…….



The video shows three SwarmRobots being controlled by one InfraRed signal – sorry for the poor video quality.
Looking at ways to have some sort of SwarmRobot display for MakerCarnival in Shanghai in early November, found this AtTiny 2313 code which can decode RC5 IR. It compiled, loaded and ran (verified looking at serial data output), but it did not detect IR from several different remote controls tried.
Using this Arduino code, (which uses some really nice multi-protocol IR receive and transmit libraries) it was discovered that all the remote controls used where NEC protocol, not RC5! Research indicates the NEC protocol is very common in Asia!
Rather than find NEC code for the AtTiny, or write code decode NEC, I used the above library to send RC5 and now a SwarmRobot can receive commands and as the shows, several SwarmRobots can be controlled at the same time! Kept using RC5 because it actually sends two sets of information an ID and a command, so this really fits controlling robot X to do command Y, or group z of robots to all do same command.
The code is on GitHub: SwarmRobot AtTiny2313 and the Arduino transmitter.
Success:- Using one InfraRed transmitter LED and four receiver LEDs for 360 degree object avoidance. The program logic is very simple at present.
Unfortunately the setup is not yet reliable – works one day but not the next and there are still some initialisation issues.
Biggest issue seems to be that there are huge variations in the functionality of IR receiver LEDs and we have not found matching data sheets for the two types we are using!

The LittleWire was mainly purchased to support Ihsan as he has been very open, providing a lot of really interesting information about his build process and design and it has also been interesting seeing the DangerousPrototypes community helping that process and even building many variations.
But now it looks like it will become my main and highly used programmer and in high demand for the Swarm Robot project, so I might have trouble finding time to play with all the other modes it has!
Thanks Ihsan!